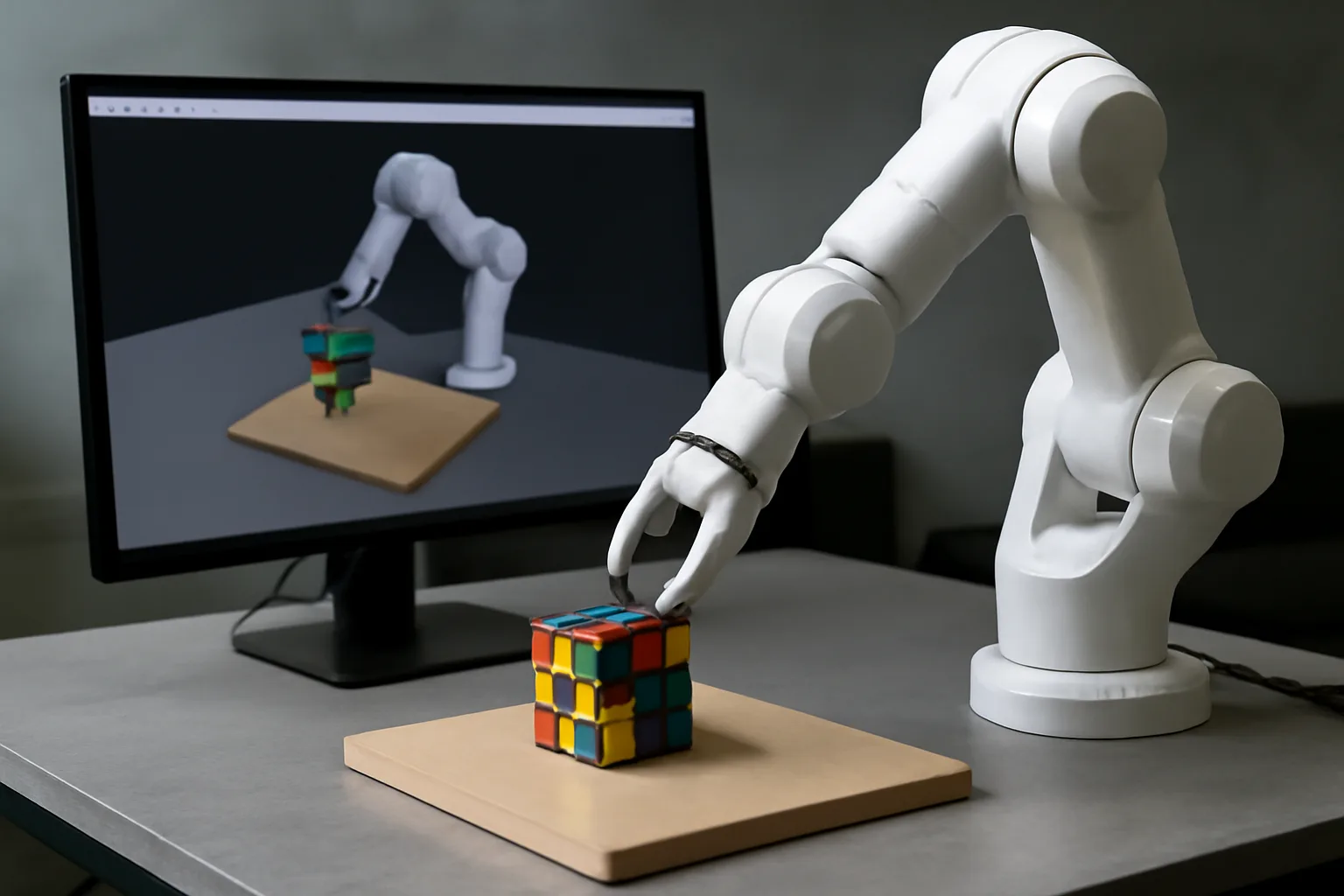
OpenAI обяви пускането на нова библиотека с отворен код, предназначена за симулация на физически процеси в роботиката. Тази библиотека използва мощния физичен двигател MuJoCo и е написана на Python, което я прави леснодостъпна и удобна за интеграция в съществуващи проекти.
Какво представлява новата библиотека?
Новият софтуер е резултат от над година интензивни изследвания в областта на роботиката, проведени от OpenAI. Той предоставя високопроизводителна среда за симулация, която позволява на разработчиците да моделират и тестват сложни физични взаимодействия в реалистични условия. Използването на MuJoCo като основен двигател гарантира прецизност и ефективност при изчисленията, а Python интерфейсът осигурява гъвкавост и удобство при програмирането.
Защо това е важно?
Симулацията на физически процеси е ключова за развитието на роботиката и изкуствения интелект, тъй като позволява тестване и оптимизация на алгоритми без необходимост от скъпо и времеемко хардуерно прототипиране. Високата производителност и лесната интеграция на библиотеката могат значително да ускорят изследователската и развойна дейност в тази област.
По-широк контекст
В последните години роботиката и изкуственият интелект се развиват с бързи темпове, като симулациите играят все по-голяма роля в обучението на автономни системи. MuJoCo е доказан физичен двигател, използван в много научни и индустриални проекти, но досега интеграцията му с Python не беше оптимизирана за висока производителност. Новата библиотека на OpenAI запълва тази празнина, предоставяйки на общността мощен инструмент с отворен код.
Какво следва?
С отворения достъп до тази библиотека се очаква да се появят нови иновации в роботиката и AI, тъй като повече разработчици и изследователи ще могат да експериментират с реалистични симулации. Възможно е да видим и интеграция с други платформи и инструменти, както и разширяване на функционалностите в бъдеще, което ще подпомогне по-бързото развитие на автономни системи и интелигентни роботи.